Chapter4 插值和拟合 ¶
插值 ¶
插值函数 ¶
一般有代数多项式、有理函数、三角函数,其中有理插值可使区间内插值误差分布均匀,适用于某些被插函数具有无穷间断点的附近
插值函数存在唯一定理 ¶

插值多项式存在唯一性 ¶

插值余项 ¶

内插与外推 ¶
- 内插 插值点位于插值区间内,即\(a<x<b\)
- 外推 插值点位于插值区间外,即\(x<a\)或\(x>b\),但又较接近于插值区间端点时
插值余项误差 ¶
- 插值多项式仅与已知数据有关,与 \(f(x)\) 原来形式无关,但余项与 \(f(x)\) 密切相关
- 若 \(f(x)\) 本身是一个不超过 n 次多项式,则 \(P_{n}(x)=f(x)\)
- 对于多项式插值,增加阶数不一定能提高精度 ( 一般推荐 3j 个节点的插值 )
- 插值点 \(x\) 不能位于插值区间之外的远处
Lagrange 插值多项式 ¶
 ```matlab
%拉格朗日插值多项式
function y_predict=lagrange(x_data,y_data,x_predict,num)
%num为插值节点数目
```matlab
%拉格朗日插值多项式
function y_predict=lagrange(x_data,y_data,x_predict,num)
%num为插值节点数目
volumn_data=length(x_data); volumn_predict=length(x_predict); y_predict=zeros(1,volumn_predict);
% 根据插值节点数目进一步筛选数据 divide=floor((volumn_data-1)/num); x_train=zeros(1,num); y_train=zeros(1,num); for i=1:num x_train(i)=x_data(1+i*divide); y_train(i)=y_data(1+i*divide); end
% 计算预测值 for i=1:volumn_predict for j=1:num term=1; for k=1:num if k~=j term=term*(x_predict(i)-x_train(k))/(x_train(j)-x_train(k)); end end y_predict(i)=y_predict(i)+term*y_train(j); end end
end
##### 缺点
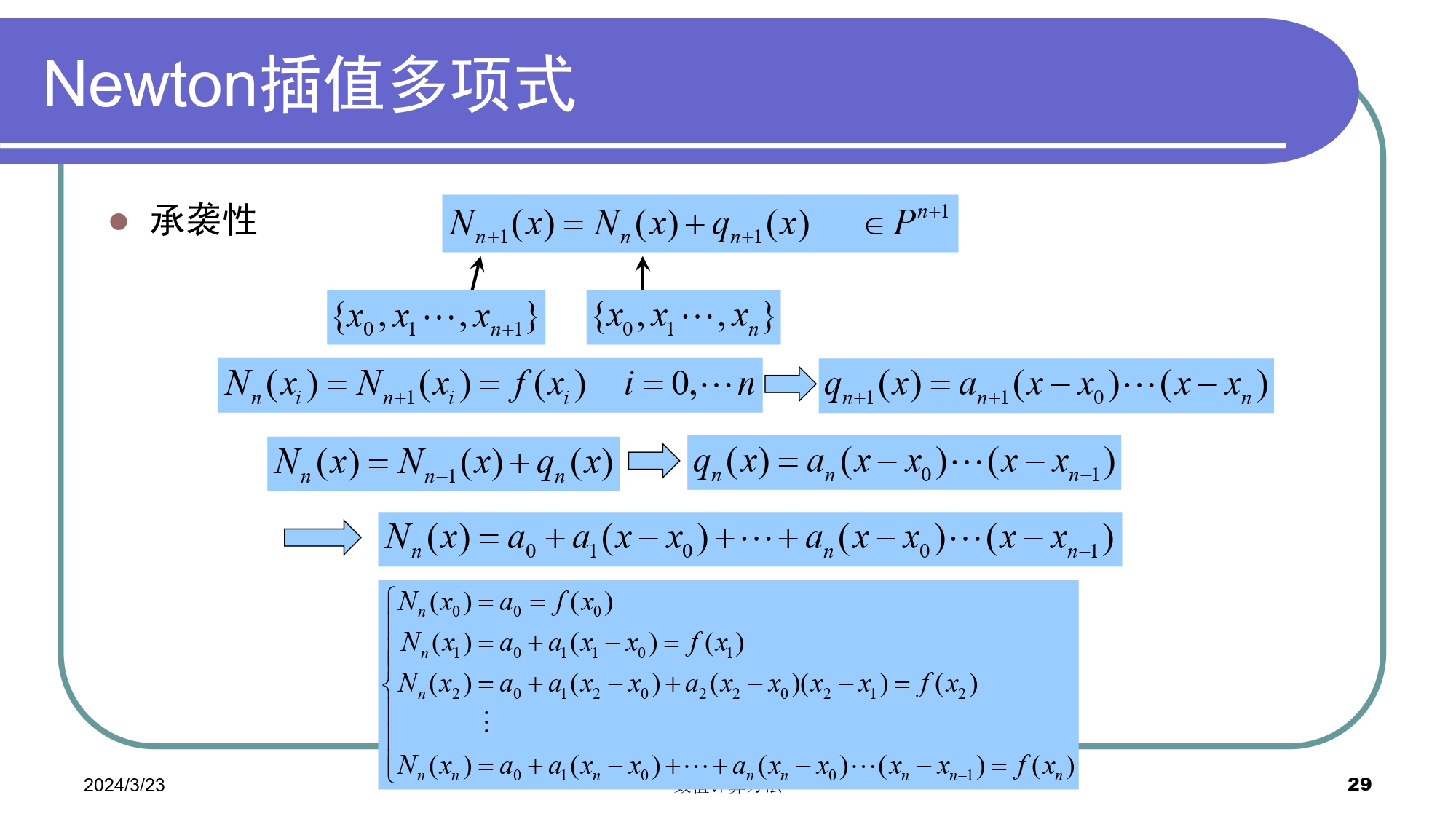
- 无承袭性:增加一个节点,所有的基函数都要重新计算
##### 适用场景
- 均匀分布的数据点
- 低阶插值
- 数据点误差较小
- 用于插值而非外推
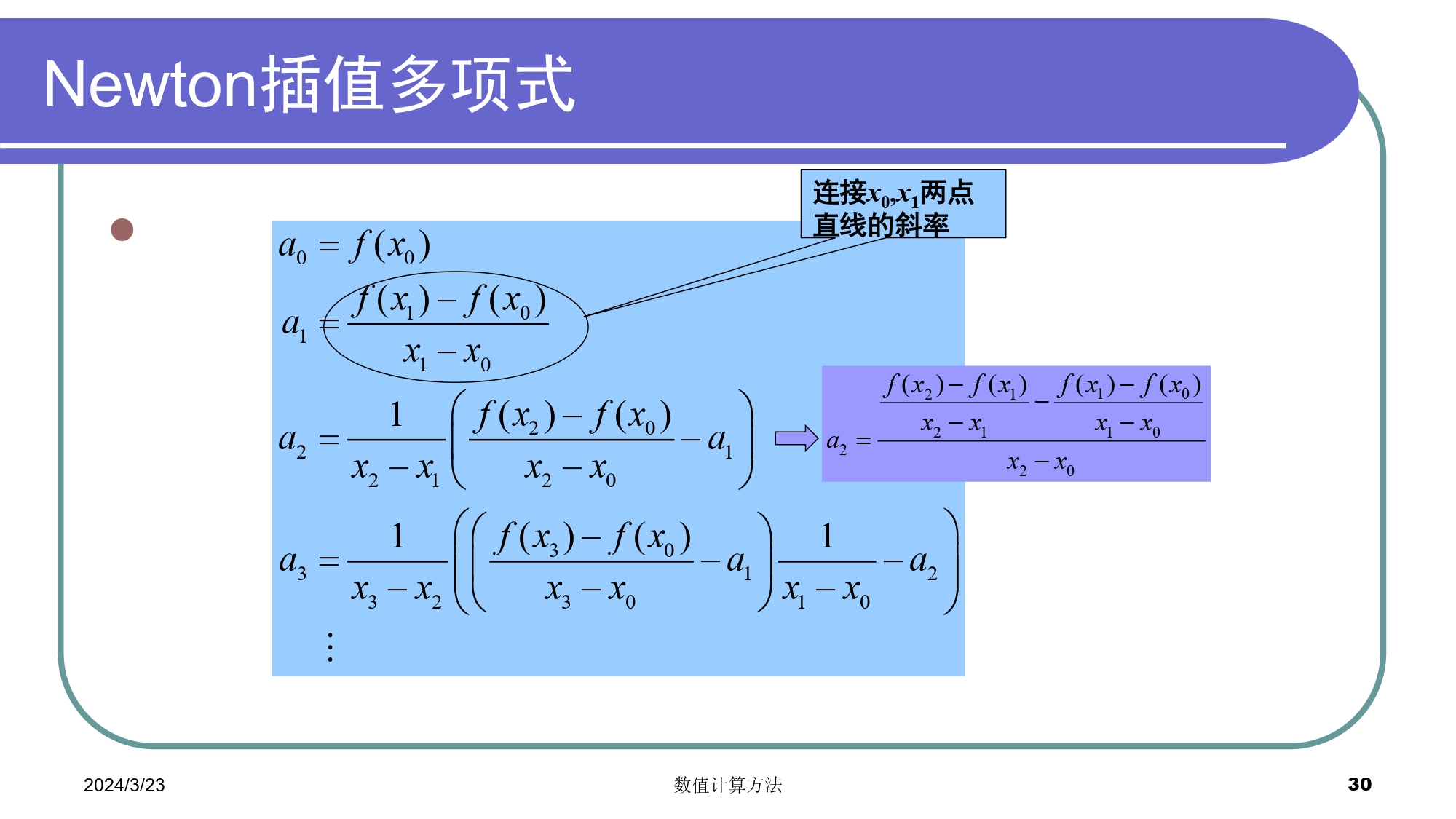
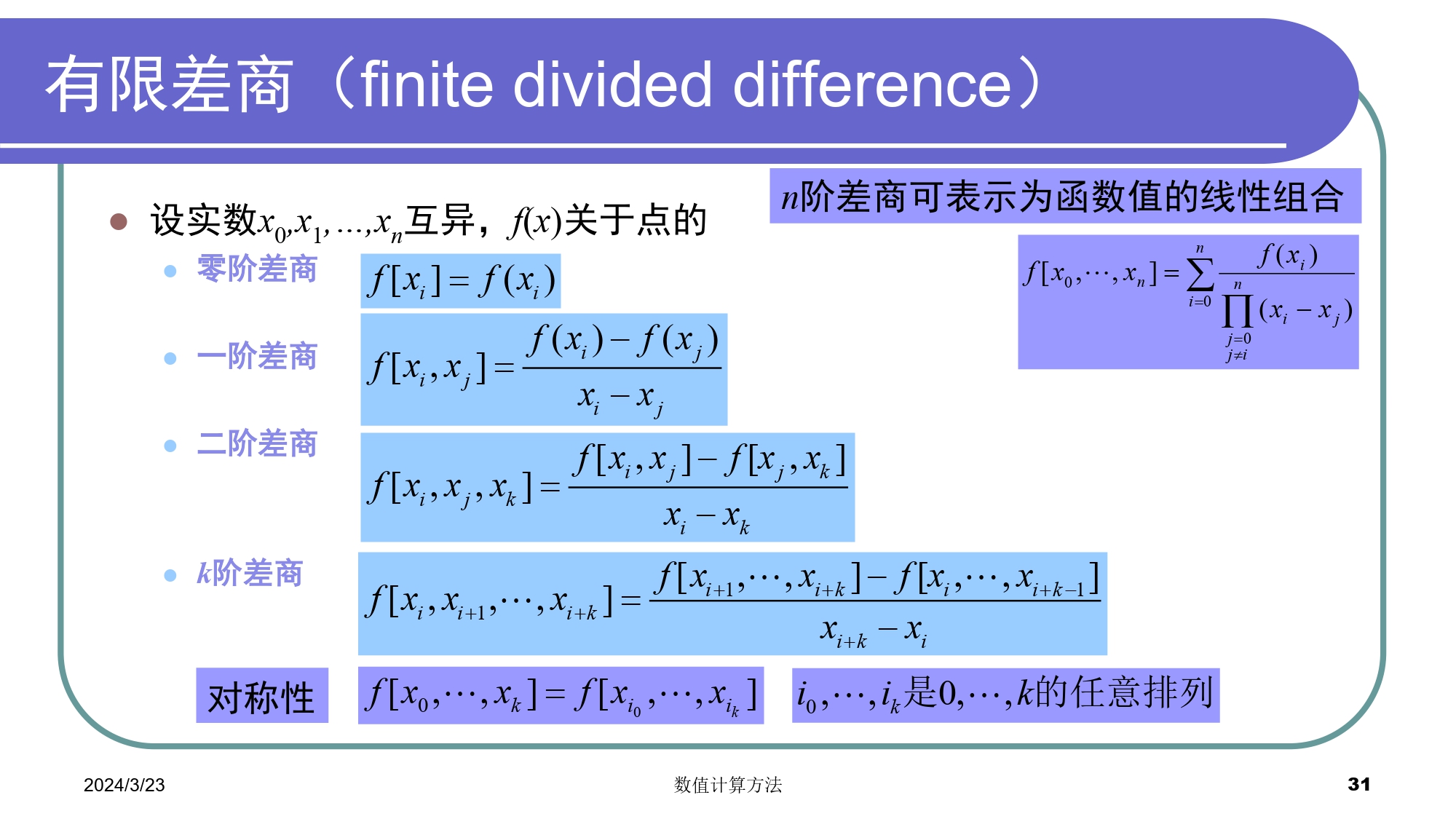
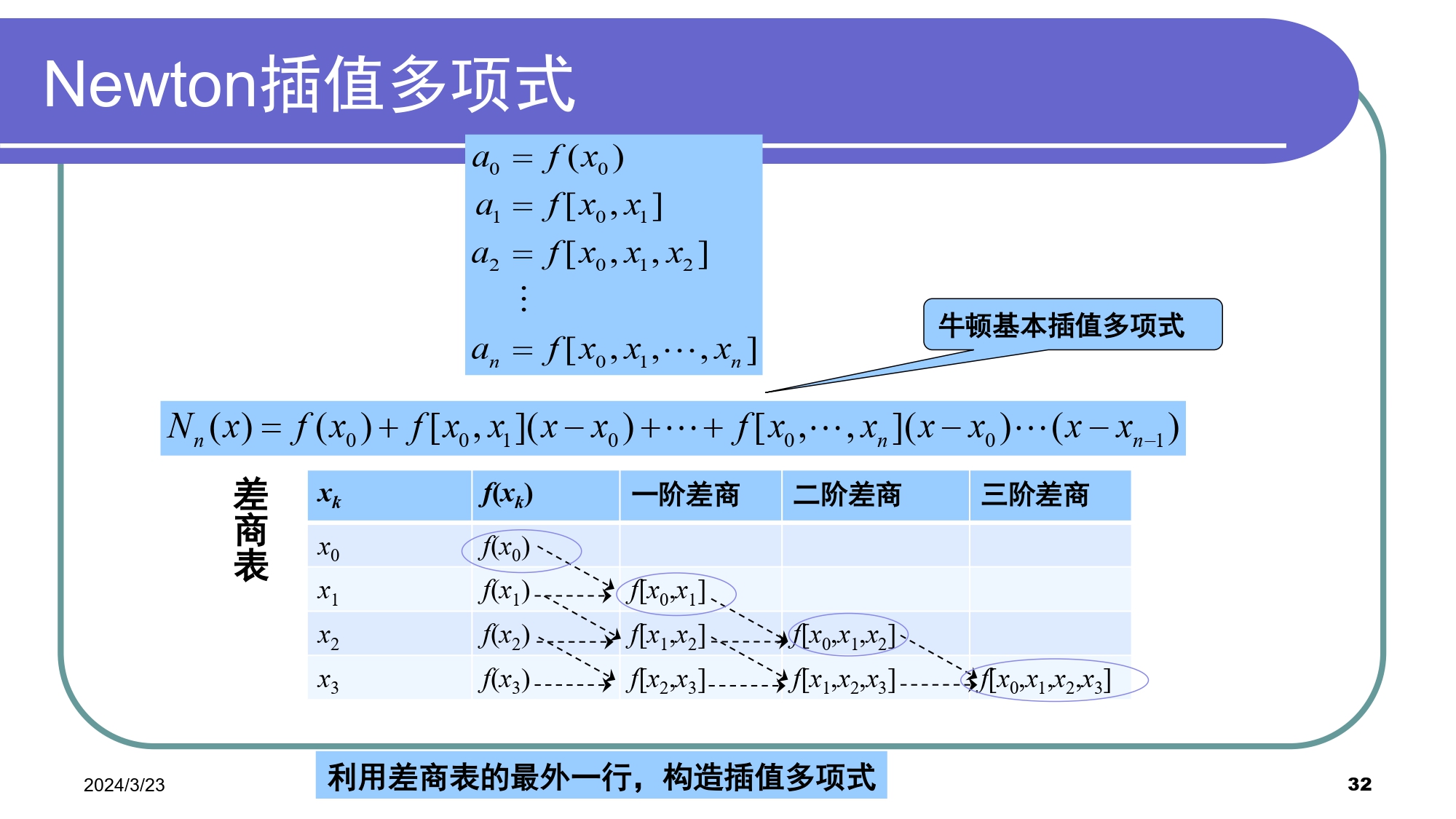
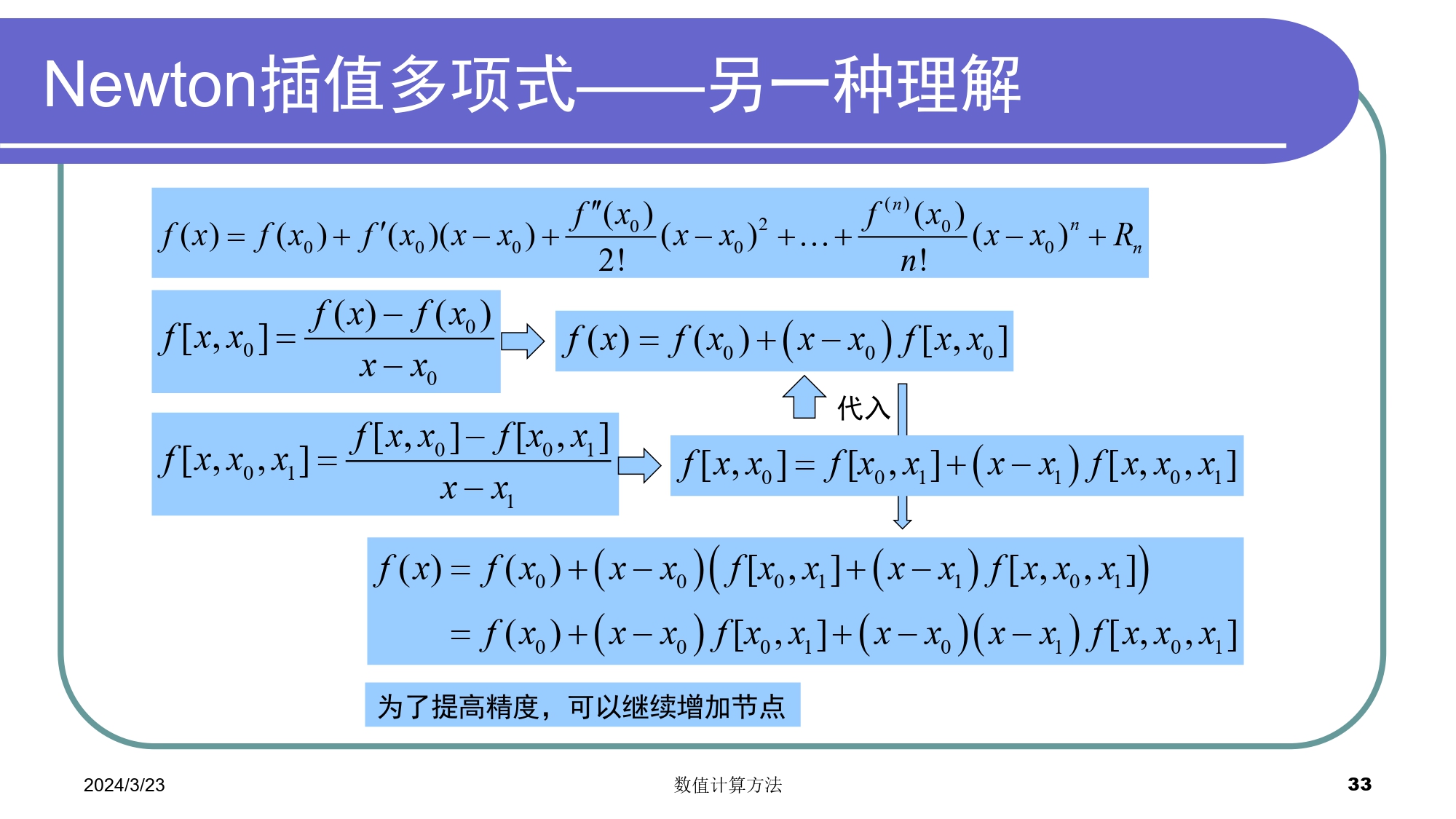
#### Newton插值多项式
##### 等距节点的插值
数据在空间上间距相等
- 步长
$x_0<...<x_n$,其中$x_i-x_{i-1}=h$,$x_i=x_0+ih$,h被称作步长
- 有限差分
- $\Delta f(x)=f(x+h)-f(x)$ 一阶向前差分
- $\nabla f(x)=f(x)-f(x-h)$ 一阶向后差分
- $\delta f(x)=f(x+h/2)-f(x-h/2)$ 一阶中心差分
- $\Delta$ 前差算子 $\nabla$ 后差算子 $\delta$ 中差算子
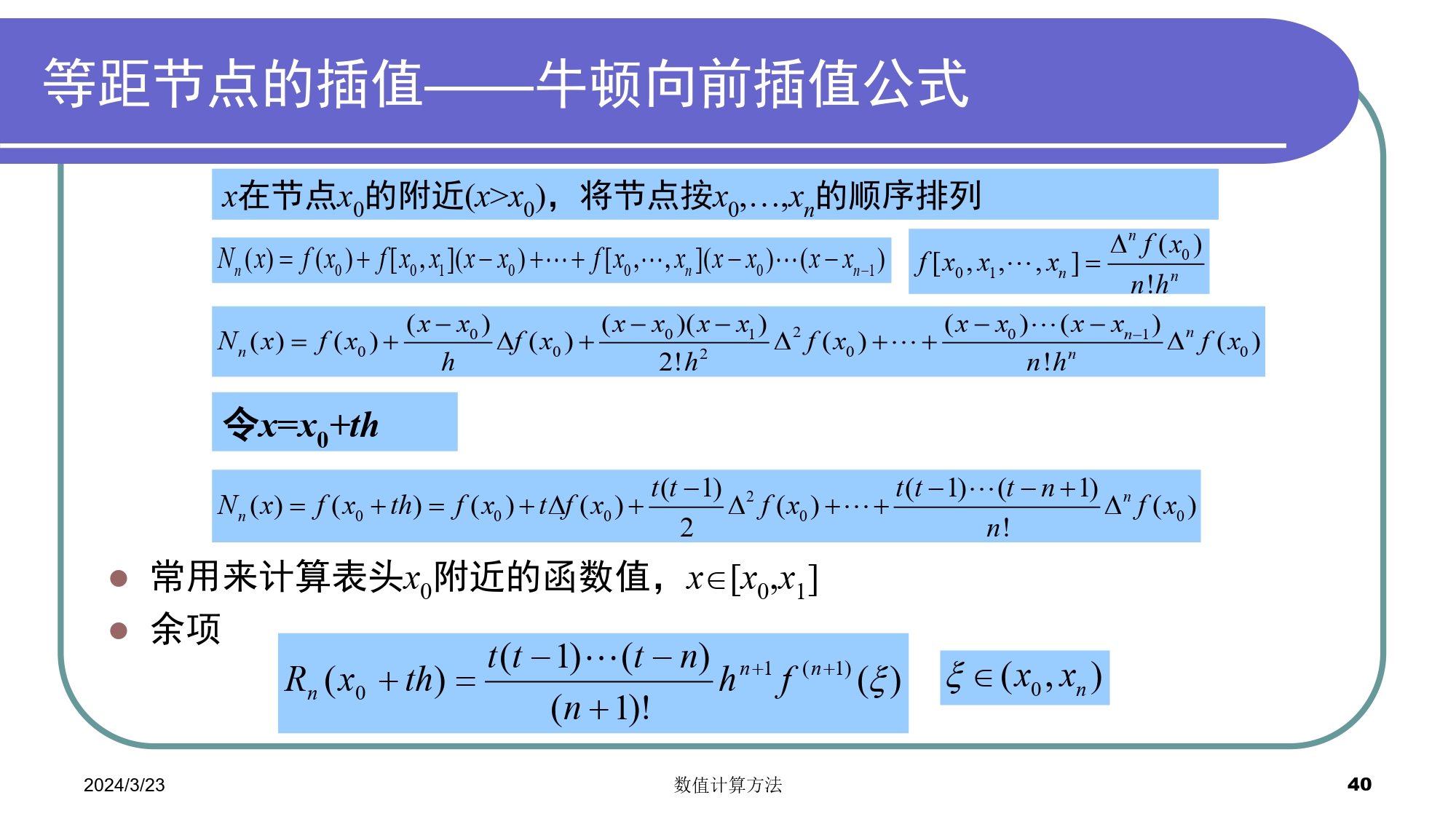
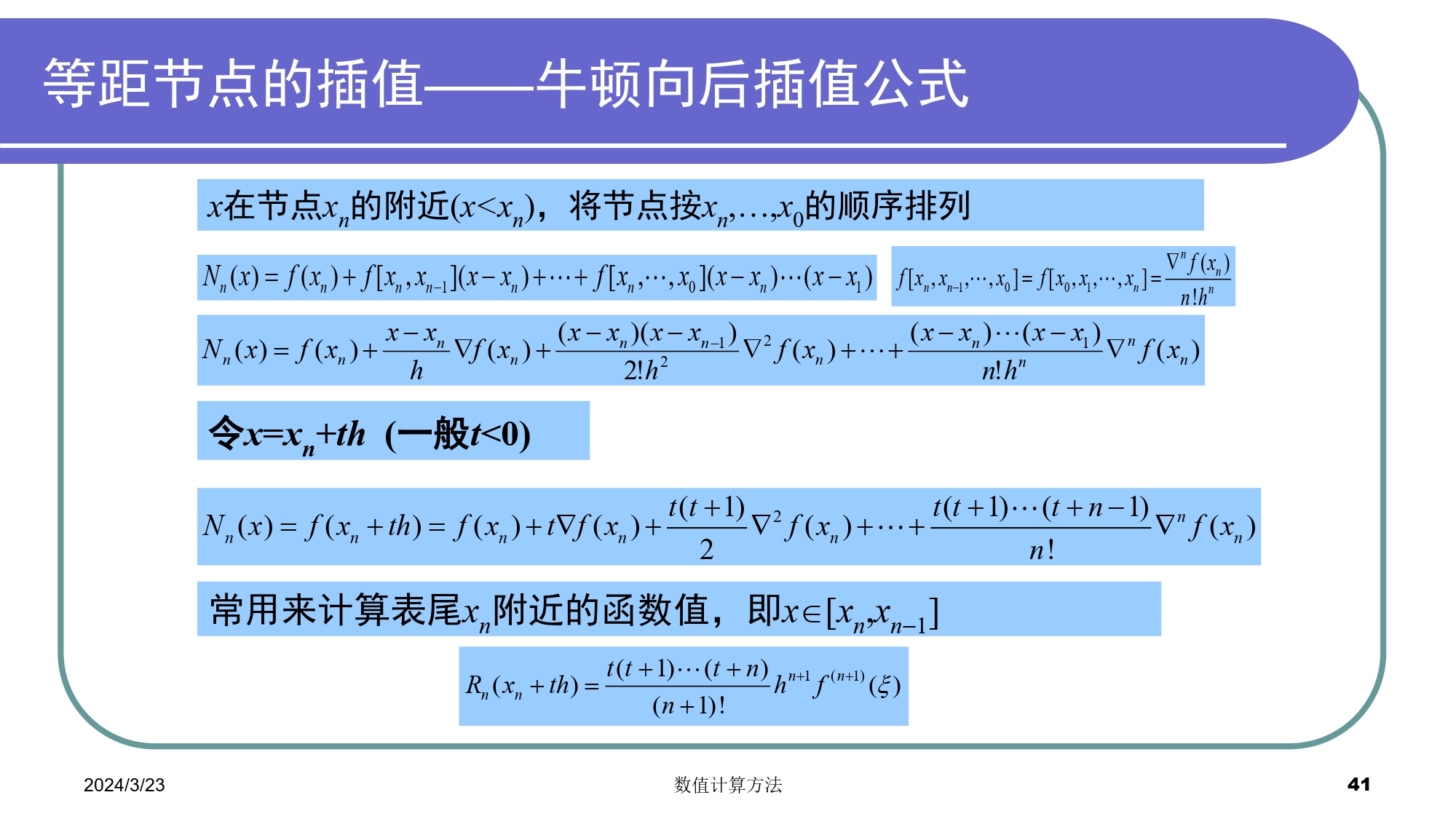
##### Newton向前插值公式
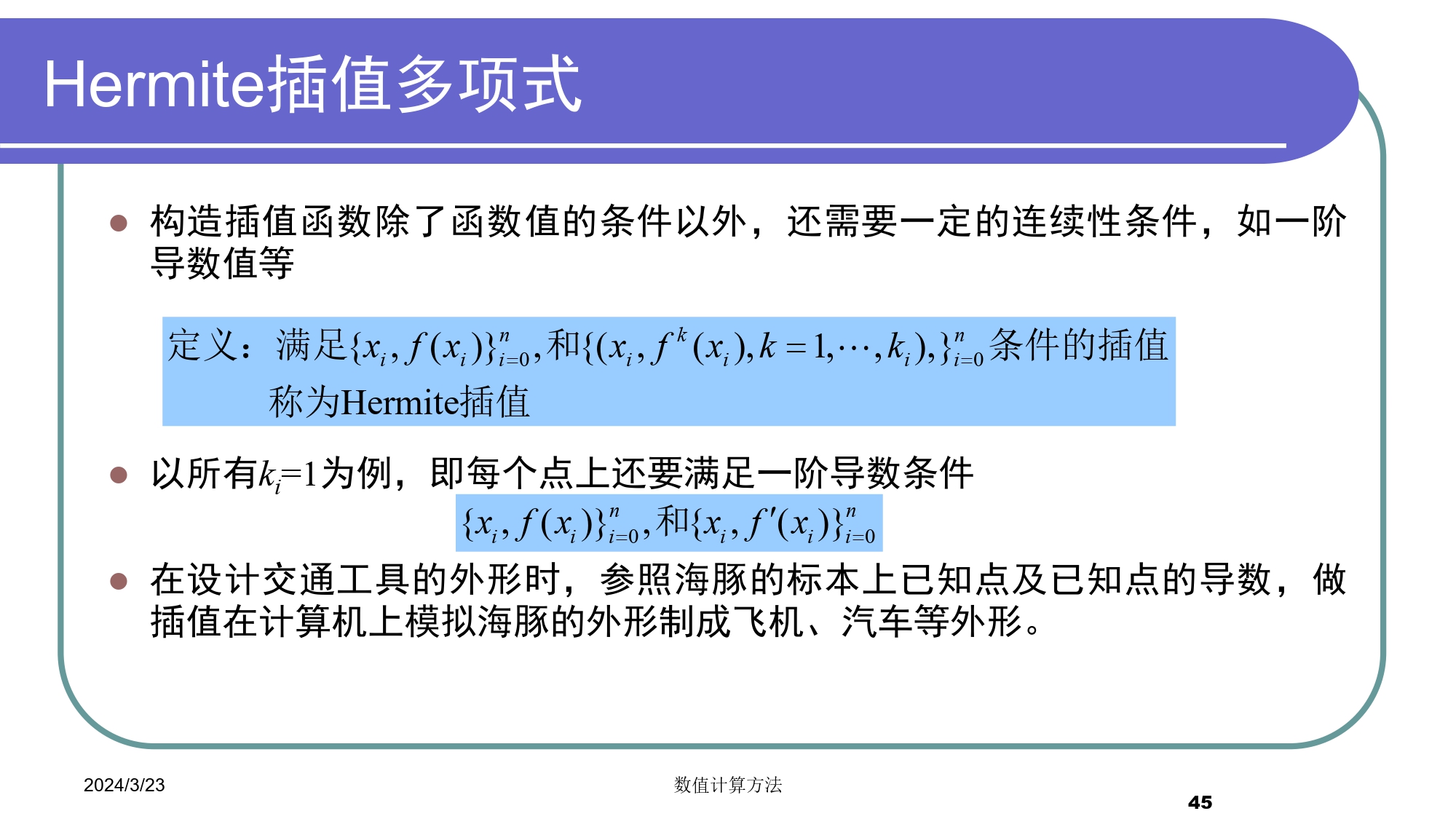
#### Hermite插值多项式
#### Runge现象
插值多项式次数越高:
1. 计算量大
2. 在部分区间(两端)激烈振荡,截断误差/计算余项偏大
#### 插值误差
- 截断误差是插值的收敛性问题,Runge现象
- 舍入误差是插值的稳定性稳定
- 为避免Runge和不稳定,一般限定n<7
- n较大时采用分段低次插值、样条插值、次数较低的最小二乘逼近
#### 分段低次插值
为了避免龙格现象,可以对每个小区间进行低次多项式插值,常见的有分段线性插值和分段抛物插值
```matlab
%分段低次插值
function y_predict=piecewise(x_data,y_data,x_predict)
volumn_data=length(x_data);
volumn_predict=length(x_predict);
y_predict=zeros(1,volumn_predict);
%分段线性插值
for i=1:volumn_predict
%外推
if x_predict(i)<x_data(1)
y_predict(i)=y_data(1)+(y_data(2)-y_data(1))/(x_data(2)-x_data(1))*(x_predict(i)-x_data(1));
end
if x_predict(i)>x_data(volumn_data-1)
y_predict(i)=y_data(volumn_data-1)+(y_data(volumn_data)-y_data(volumn_data-1))*(x_data(volumn_data)-x_data(volumn_data-1))*(x_predict(i)-x_data(volumn_data-1));
end
%内插
for j=1:volumn_data-1
if x_predict(i)>=x_data(j) && x_predict(i)<=x_data(j+1)
y_predict(i)=y_data(j)+(y_data(j+1)-y_data(j))/(x_data(j+1)-x_data(j))*(x_predict(i)-x_data(j));
end
end
end
%{
%分段抛物插值
coefficient=zeros(volumn_data-2,3);%系数矩阵
for i=1:volumn_data-2
k2=(y_data(i+2)-y_data(i+1))/(x_data(i+2)-x_data(i+1));
k1=(y_data(i+1)-y_data(i))/(x_data(i+1)-x_data(i));
coefficient(i,1)=(k2-k1)/(x_data(i+2)-x_data(i));
coefficient(i,2)=k1-coefficient(i,1)*(x_data(i+1)+x_data(i));
coefficient(i,3)=y_data(i)-coefficient(i,1)*x_data(i)*x_data(i)-coefficient(i,2)*x_data(i);
end
for i=1:volumn_predict
%外推
if x_predict(i)<x_data(1)
y_predict(i)=coefficient(1,1)*x_predict(i)*x_predict(i)+coefficient(1,2)*x_predict(i)+coefficient(1,3);
end
if x_predict(i)>x_data(volumn_data-2)
y_predict(i)=coefficient(volumn_data-2,1)*x_predict(i)*x_predict(i)+coefficient(volumn_data-2,2)*x_predict(i)+coefficient(volumn_data-2,3);
end
%内插
for j=1:volumn_data-2
if x_predict(i)>=x_data(j) && x_predict(i)<=x_data(j+2)
y_predict(i)=coefficient(j,1)*x_predict(i)*x_predict(i)+coefficient(j,2)*x_predict(i)+coefficient(j,3);
break;
end
end
end
%}
end
优点 ¶
- 公式简单,只要区间充分小,就能保证误差要求
- 局部性质良好,修改某个节点,只影响相邻的两个区间
缺点 ¶
- 不能保证节点处插值函数的导数连续,因而不能满足某些工程曲线光滑性的要求
样条插值 ¶
概览 ¶
- 样条插值的原理和分段低次插值相同,都是使用分段多项式来逼近数据
- 在样条插值中,相邻子区间的插值函数除了满足函数值连续,还对一阶连续性和二阶连续性有要求



三弯矩法 ¶
- 算法分析 简单地说就是将二阶导函数用线性函数表示,然后通过积分推导出三次方程的系数
- 数据准备 导入已知的数据点,其中自变量\(x_{i}\),因变量\(y_{i}\)
- 计算差分 计算相邻数据点的差分,得到自变量的差分\(h_{i}=x_{i+1}-x_{i}\)和因变量的差分\(\delta_{i}=(y_{i+1}-y_{i})/h_{i}\)
- 计算弯矩 在每个数据点\(x_{i}\)处,计算插值函数的弯矩\(M_{i}\),通常通过以下公式计算\(M_{i}=6(\frac{\delta_{i+1}-\delta_{i}}{h_{i+1}}-\frac{\delta_{i}-\delta_{i-1}}{h_{i}})\) 其中\(M_{1}\)和\(M_{n}\)通常设定为零
- 构建系数矩阵 根据已知数据点和弯矩值,构建系数矩阵。系数矩阵的每一行对应一个插值段的系数
- 求解边界条件
由以上步骤得到4n-2个条件,我们需要在区间端点加上两个约束条件,称为边界条件。一般有:
- 固定边界 (Clamped Spline) 已知两端的一阶导数值,即 \(S^\prime(x_{0})=y_{0}^\prime,S^\prime(x_{n})=y_{n}^\prime\)
- 自然边界 (Nature Spline) 已知两端的二阶导数值,即 \(S^{\prime\prime}(x_{0})=y_{0}^{\prime\prime},S^{\prime\prime}(x_{n})=y_{n}^{\prime\prime}\)
- 非扭结边界 (Not-A-Knot Spline) 已知第一个插值节点的三阶导数值与第二个相等,最后一个插值点的三阶导数值与倒数第二个相等,即 \(S_{0}^{\prime\prime\prime}(x_{0})=S_{1}^{\prime\prime\prime}(x_{1}),S_{n-2}^{\prime\prime\prime}(x_{n-1})=S_{n-1}^{\prime\prime\prime}(x_{n})\)
- 求解插值函数
解出系数矩阵,得到每个插值段的系数。这些系数就是样条插值函数的参数,用于计算插值函数在任意点的值。




%三次样条插值 function y_predict=spline(x_data,y_data,x_predict) volumn_data=length(x_data); volumn_predict=length(x_predict); y_predict=zeros(1,volumn_predict); %计算步长 h_array=zeros(1,volumn_data-1); for i=1:volumn_data-1 h_array(i)=x_data(i+1)-x_data(i); end %构造线性方程组 %构造左侧系数矩阵 A=zeros(volumn_data,volumn_data); for i=1:volumn_data if i==1 || i==volumn_data A(i,i)=1; else A(i,i-1)=h_array(i-1); A(i,i)=2*(h_array(i-1)+h_array(i)); A(i,i+1)=h_array(i); end end %构造右侧向量 B=zeros(1,volumn_data); for i=1:volumn_data if i==1 || i==volumn_data B(i)=0; else B(i)=(y_data(i+1)-y_data(i))/h_array(i)-(y_data(i)-y_data(i-1))/h_array(i-1); end end disp(A) disp(B) %求解 X=gauss(A,B); %计算样条函数的系数 a_array=zeros(1,volumn_data-1); c_array=zeros(1,volumn_data-1); b_array=zeros(1,volumn_data-1); d_array=zeros(1,volumn_data-1); for i=1:volumn_data-1 a_array(i)=y_data(i); c_array(i)=X(i)/2; d_array(i)=(X(i+1)-X(i))/6/h_array(i); b_array(i)=(y_data(i+1)-y_data(i))/h_array(i)-h_array(i)/2*X(i)-h_array(i)/6*(X(i+1)-X(i)); end %计算预测值 for i=1:volumn_predict %外推 if x_predict(i)<x_data(1) y_predict(i)=a_array(1)+b_array(1)*(x_predict(i)-x_data(1))+c_array(1)*power(x_predict(i)-x_data(1),2)+d_array(1)*power(x_predict(i)-x_data(1),3); end if x_predict(i)>x_data(volumn_data) y_predict(i)=a_array(volumn_data-1)+b_array(volumn_data-1)*(x_predict(i)-x_data(volumn_data))+c_array(volumn_data-1)*power(x_predict(i)-x_data(volumn_data),2)+d_array(volumn_data-1)*power(x_predict(i)-x_data(volumn_data),3); end %内插 for j=1:volumn_data-1 if x_predict(i)>=x_data(j) && x_predict(i)<=x_data(j+1) y_predict(i)=a_array(j)+b_array(j)*(x_predict(i)-x_data(j))+c_array(j)*power(x_predict(i)-x_data(j),2)+d_array(j)*power(x_predict(i)-x_data(j),3); break; end end end end
逆插值 ¶
- 交换变量
- 横坐标在空间分布的不均匀性会导致插值多项式产生振荡 ( 即使是低阶多项式 )
- 利用初始数据进行插值,得到插值多项式后,寻找对应的 \(x\) 值,相当于方程求根
拟合 ¶
求出一个经验公式,使各数据点从总体上最贴近,而不一定要求构造的函数曲线通过所给数据点
最小二乘方法 ¶

基本环节 ¶
- 确定 \(\varphi(x)\) 的形式
- 求最小二乘解
解法 ¶



代数多项式拟合 ¶


总结 ¶
- 相同点
- 从函数角度看,插值法与最小二乘法都是根据函数表求函数的近似表达式的问题,属于函数逼近问题
- 从几何上看,二者都是根据一列数据点求曲线的近似曲线问题,是曲线拟合问题
- 不同点
- 插值法根据插值条件选择近似函数
- 最小二乘法根据“偏差平方和最小”原则选择近似函数
评论区