Chap3 线性系统的时域分析法 ¶
系统时间响应的性能指标 ¶
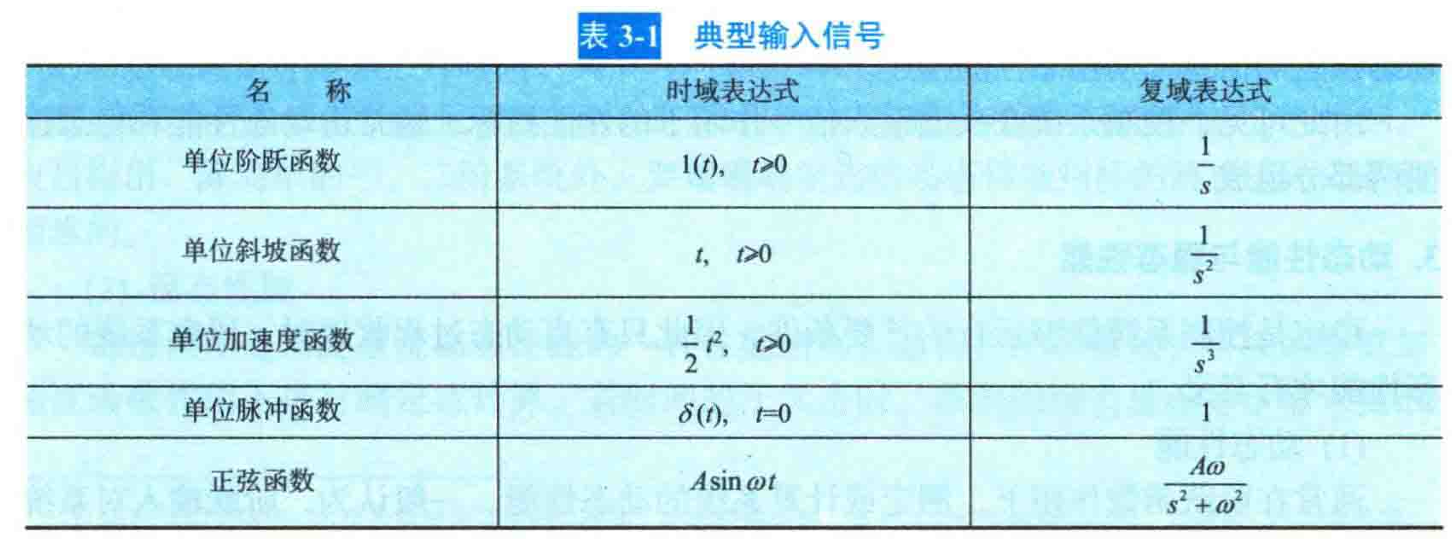
典型输入信号 ¶
动态过程和稳态过程 ¶
控制系统的时间响应由动态过程和稳态过程组成
动态过程:系统在典型输入信号作用下,系统输出量从初始状态到最终状态的响应过程,又称过渡过程或瞬态过程
稳态过程:系统在典型输入信号作用下,当时间 t 趋于无穷时,系统输出量的表现方式,又称稳态响应
动态性能和稳态性能 ¶
控制系统的性能包括动态性能和稳态性能
动态性能 ¶
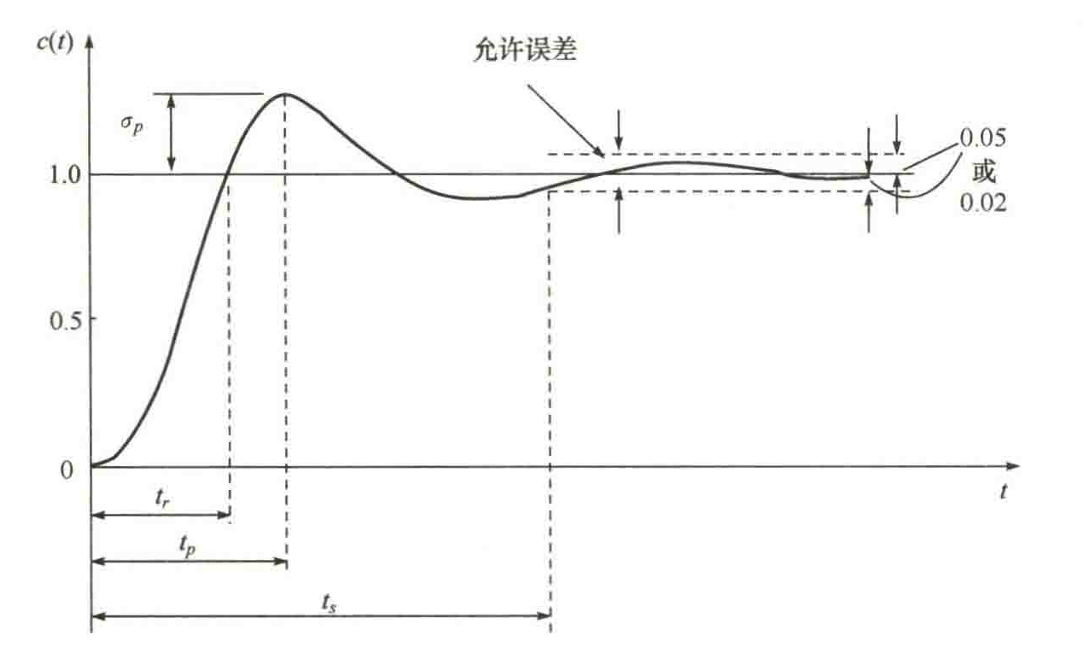
描述稳定的系统在单位阶跃函数作用下,动态过程随时间 t 的变化状况的指标,称为动态性能指标,包括
-
上升时间(rise time)\(t_r\):响应从终值 10% 上升到终值 90% 所需的时间;对于有振荡的系统,亦可定义为响应从零第一次上升到终值的时间
-
峰值时间(peak time)\(t_p\):响应超过其终值到达第一个峰值所需的时间
-
调节时间(settling time)\(t_s\):响应到达并保持在终值 \(\pm\)5% 内所需的最短时间
-
超调量 \(\sigma \%\):又称最大超调量或百分比超调量,响应的最大偏离量 \(c(t_p)\) 与终值 \(c_{\infty}\) 的差与终值比的百分数,即
若 \(c(t_p)<c_{\infty}\),则响应无超调
通常,用 \(t_p\) 或 \(t_r\) 评价系统的响应速度;用 \(\sigma\%\) 评价系统的阻尼程度;而 \(t_s\) 是同时反映响应速度和阻尼程度的综合性指标
稳态性能 ¶
稳态误差是反映系统的稳态性能的阶跃响应指标,通常在阶跃函数、斜坡函数或加速度函数作用下进行测定或计算
若时间趋于无穷时,系统的输出量不等于输入量或输入量的确定函数,则系统存在稳态误差。稳态误差是系统控制精度或抗扰动能力的一种度量
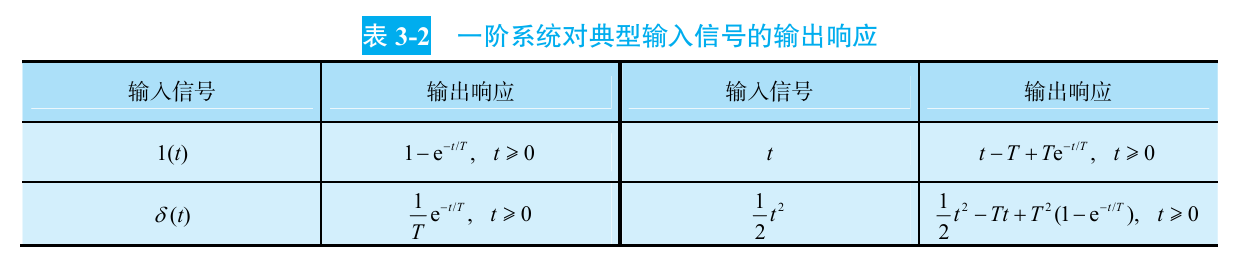
一阶系统的时域分析 ¶
一阶系统的传递函数为
系统对输入信号导数的响应,就等于系统对该输入信号响应的导数
系统对输入信号积分的响应,就等于对该输入信号响应的积分,而积分常数由零输出初始条件确定
二阶系统的时域分析 ¶
二阶系统的传递函数为
\(\omega_n\) 称为自然频率(或无阻尼振荡频率)
\(\xi\) 称为阻尼比(或相对阻尼系数)
特征方程 \(s^2+2\xi \omega_n s+\omega_n^2\) 的两个特征根(闭环极点)为 \(s_{1,2}=-\xi \omega_n \pm \omega_n \sqrt{\xi^2-1}\)
根据 \(\xi\) 和 1 的大小关系将系统分为欠阻尼、临界阻尼、过阻尼
\(\omega_d=\omega_n \sqrt{1-\xi^2}\) 称为阻尼自然频率
二阶系统阶跃响应性能指标
上升时间
峰值时间
超调量
调节时间
二阶系统性能的改善 ¶
比例 - 微分控制和测速反馈控制
高阶系统的时域分析 ¶
如果在所有的闭环极点中,距虚轴最近的极点周围没有闭环零点,而其他闭环极点又远离虚轴,那么距虚轴最近的闭环极点所对应的响应分量,随时间的推移衰减缓慢,在系统的时间响应过程中起主导作用,这样的闭环极点就称为闭环主导极点
线性系统的稳定性分析 ¶
稳定性的基本概念 ¶
所谓稳定性,是指系统在扰动消失后,由初始偏差状态恢复到原平衡状态的性能
根据李雅普诺夫稳定性理论,线性控制系统的稳定性可叙述如下:
若线性控制系统在初始扰动的影响下,其动态过程随时间的推移逐渐衰减并趋于零(原平衡工作点
线性系统稳定的充分必要条件 ¶
线性系统稳定的充分必要条件:闭环系统特征方程的所有跟均具有负实部;或者说,闭环传递函数的极点均位于 s 左半平面
劳斯 - 赫尔维茨稳定判据 ¶
赫尔维茨判据
设线性系统的特征方程为
则使线性系统稳定的必要条件是:在特征方程中各项系数为正数
劳斯判据
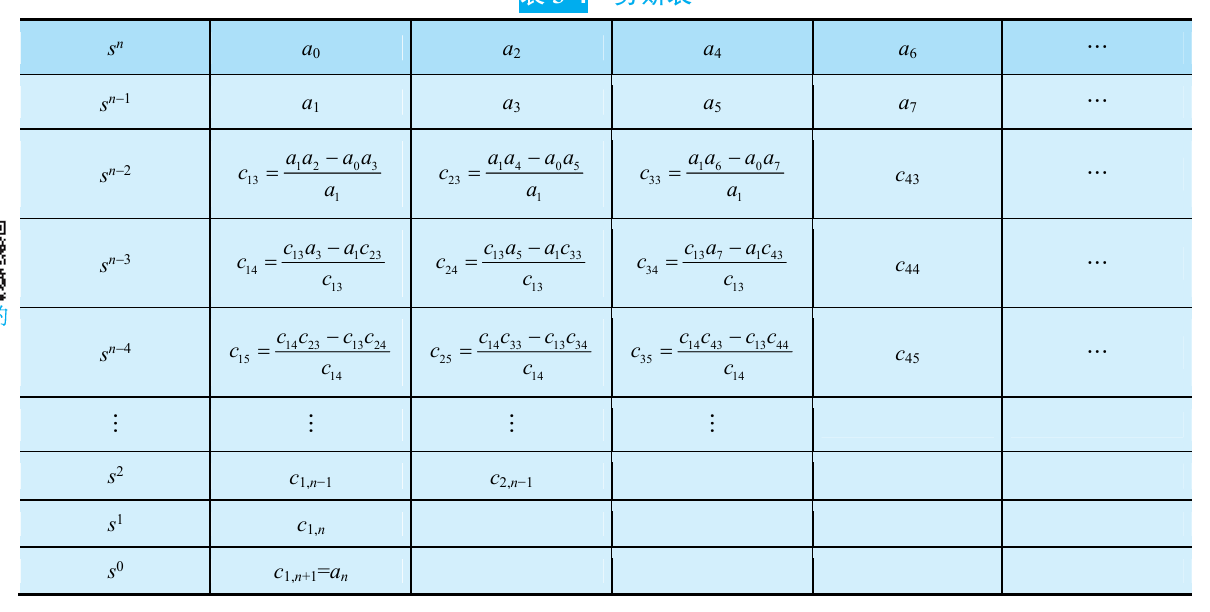
线性系统稳定的充分必要条件是劳斯表中第一列各值为正。如果劳斯表第一列中出现小于零的数值,系统就不稳定,且第一列各系数符号的改变次数,代表特征方程的正实部根的数目
线性系统的稳态误差计算 ¶
误差与稳态误差 ¶
控制系统的稳态误差定义为误差信号 \(e(t)\) 的稳态分量 \(e_{ss}(\infty)\),常以 \(e_{ss}\) 简单标志
阶跃输入作用下的稳态误差和静态位置误差系数 ¶
斜坡输入作用下的稳态误差和静态速度误差系数 ¶
加速度输入作用下的稳态误差和静态加速度误差系数 ¶
动态误差系数 ¶
扰动作用下的稳态误差 ¶
评论区